

Günümüz robotik ve otomasyon sistemleri ivmeli ve kesintisiz bir şekilde gelişmektedir. Bu gelişmelerin büyük çoğunluğunda yapay zeka teknolojileri önemli bir rol oynamaktadır. Aslında tüm bu çalışmaların temelinde, “İnsan gibi düşünebilen ancak belirli işleri insandan daha hızlı, daha verimli ve daha hatasız şekilde yerine getirebilen sistemleri nasıl üretiriz?” sorusu yatmaktadır.
İçinde bulunduğumuz son yüzyılda robotik teknolojilerinin pek çok somut örneği görülmektedir. Örneğin; üretim tesislerinde kullanılan endüstriyel robot kolları, arazi çalışmalarında görev yapan süspansiyon sistemine sahip insansız kara araçları, gözetleme ve görüntüleme amacıyla kullanılan dronlar ile dil modelleriyle çalışan akıllı ev sistemleri… Tüm bu teknolojiler, insanların yapabileceğinden çok daha uzun süre ve çok daha yüksek hızda görevlerini yerine getirebilmektedir.
Örnek verdiğimiz tüm bu teknolojilerin içerisinde, iyi ya da kötü, bir tür yapay zeka bulunmaktadır. Bu sistemlerin bazıları basit istatistiksel verilerle öğrendiğini uygulamakla kalırken, bazıları ise güçlü ve çok sayıda bilgisayarın kullanılmasını gerektiren, hesaplama kapasitesi yüksek ve mimari açıdan oldukça karmaşık yapılarla donatılmıştır.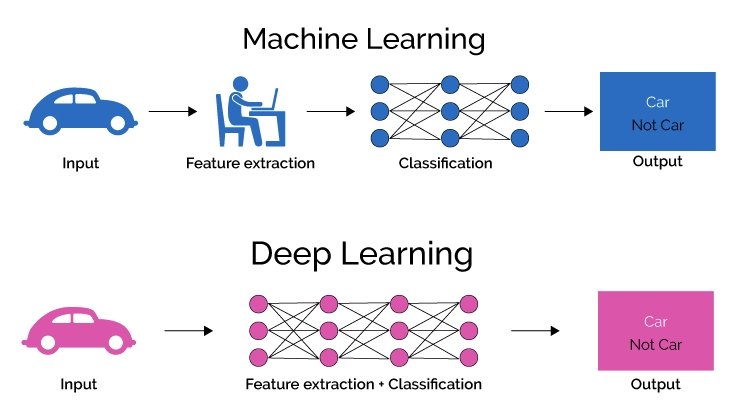
Yapay zeka kümesi içinde “basit” olarak nitelendirdiğimiz bölüm aslında makine öğrenmesi alanını kapsamaktadır ve kapsamlı bir sinir ağı içermez. Bu yaklaşım, istatistik ve analiz yöntemlerini kullanarak geleceğe yönelik tahminler yapmaya dayanır. Bunun bir üst kümesi ise, karmaşık ve çok katmanlı sinir ağlarını içeren derin öğrenmedir. Örneğin, günümüz dil modellerinde kullanılan Transformer mimarisi oldukça karmaşık bir yapıya sahiptir. Detaylara girmeden ifade edecek olursak, insan benzeri sohbet edebilen bir dil modelini eğitmek için milyarlarca parametre gerekir; bu da kişisel bilgisayarların karşılayamayacağı kadar yüksek bir hesaplama maliyeti demektir.
Otonom sistemlerde yapay zeka modellerini çalıştırabilmek için özel olarak tasarlanmış geliştirme kartları kullanılmaktadır. Bu kartlar, oyun bilgisayarlarında bulunan grafik odaklı teknolojiler—örneğin render motorları veya DLSS gibi görüntü iyileştirme sistemleri—için tasarlanmamıştır. Bunun yerine, tamamen matematiksel işlem gücü, paralel hesaplama kapasitesi ve düşük güç tüketimi üzerine optimize edilmiş yapılardır.
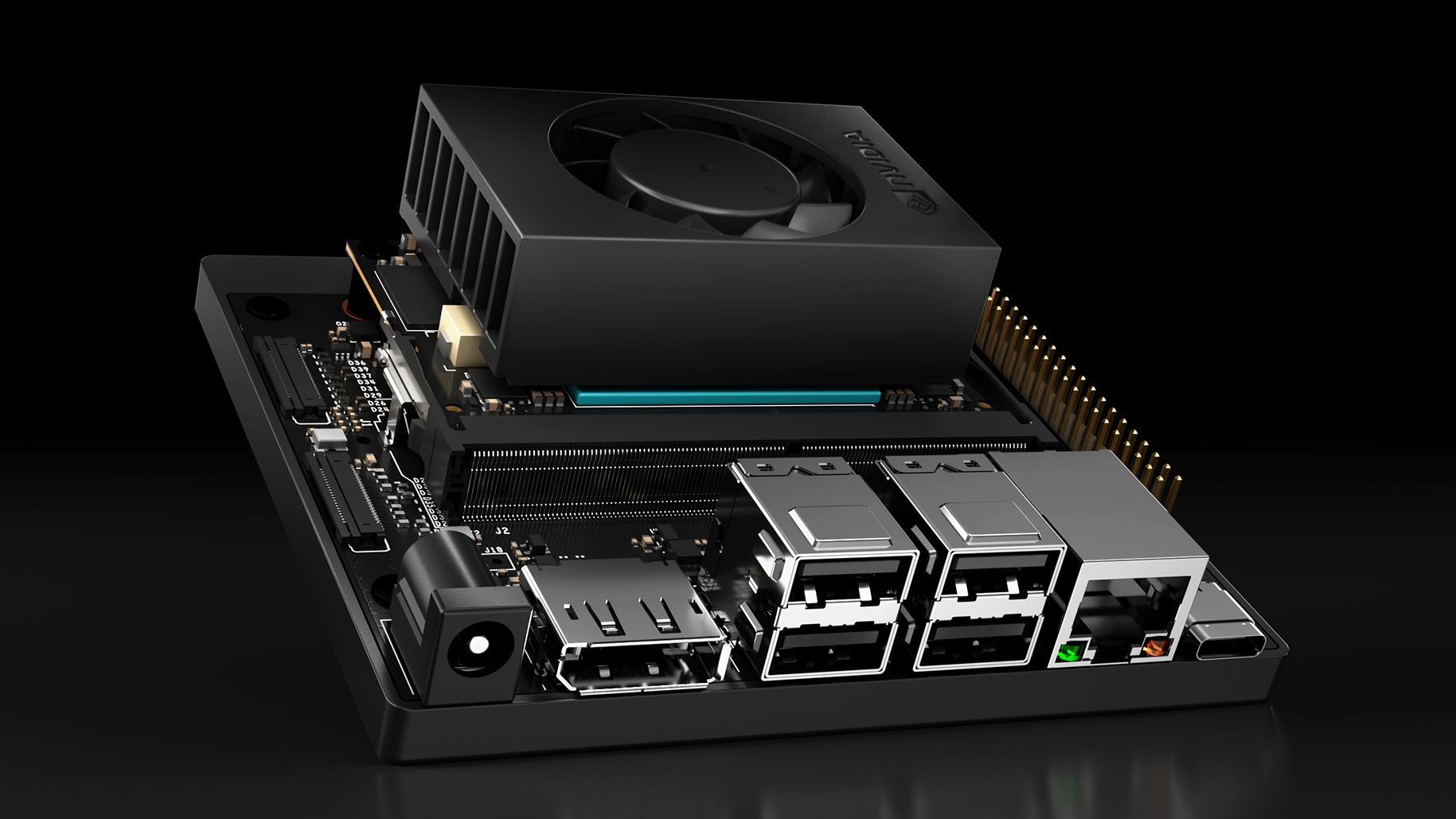
NVIDIA Jetson serisi, Google Coral TPU, Intel Movidius NPU ve çeşitli FPGA tabanlı kartlar, özellikle yapay zeka işlemlerinde kullanılan matris çarpmaları ve tensör hesaplamalarını hızlandırmak için üretilmiştir. Bu nedenle watt başına performans açısından bakıldığında, avuç içi büyüklüğündeki bu cihazlar bazı görevlerde yüksek güçlü RTX ekran kartlarına kıyasla çok daha verimli çalışabilmektedir. Ancak toplam işlem gücü açısından elbette büyük GPU’ların yerini alamazlar; sadece belirli yapay zeka iş yüklerinde optimize edilmiş bir verimlilik sunarlar.
Yine de, bu cihazlar bile modern büyük ölçekli yapay zeka modellerini—özellikle milyarlarca parametreli LLM’leri veya büyük görüntü modellerini—gerçek zamanlı olarak çalıştırmakta zorlanabilir. Bu nedenle, bu tür yüksek hesaplama gerektiren uygulamalarda bulut tabanlı yapay zeka API’lerini kullanmak çoğu zaman hem daha ekonomik hem de daha pratik bir çözüm hâline gelmektedir.
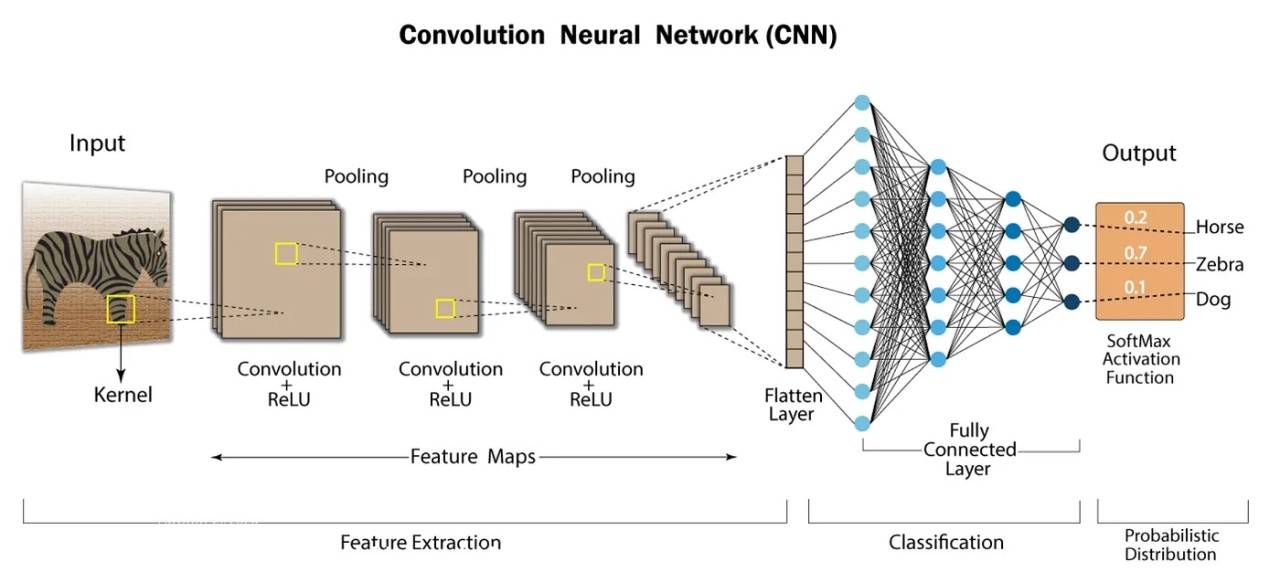
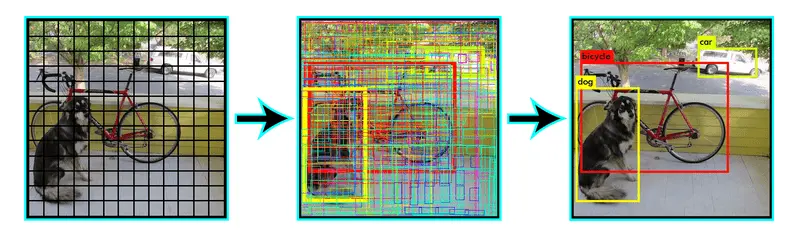
Robotik, diğer bir ifadeyle otonom sistem teknolojilerinde kullanılan yapay zekâ yöntemleri, farklı problem alanlarına göre çeşitli kategorilere ayrılabilir. Yol planlama gibi görevlerde pekiştirmeli öğrenme yaklaşımları kullanılırken, görüntü işleme alanında ağırlıklı olarak CNN tabanlı mimariler tercih edilir. Nesne tanıma veya segmentasyon gerektiren durumlarda ise, literatürde “object localization” olarak adlandırılan ve hem nesnenin ne olduğunu hem de görüntü üzerindeki konumunu belirleyebilen YOLO, R-CNN ve SSD gibi mimariler öne çıkar.
Bu durum, elbette robotik sistemin kullanıldığı sektör ve amaca göre değişiklik gösterebilir. Güvenlik odaklı uygulamalarda, bireylerin tanımlanması ve kimlik tespiti için yüz tanıma (recognition) tabanlı sistemler tercih edilirken; bir hava aracının çevresindeki nesnelere göre hareket etmesinin istendiği senaryolarda, nesnenin hem türünü hem de konumunu belirleyebilen nesne tespiti (object localization) yaklaşımları kullanılır. Benzer şekilde, kara veya otonom araçlarda yol planlama problemleri; genetik algoritmalar, denetimsiz öğrenme yöntemleri ya da pekiştirmeli öğrenme tabanlı yaklaşımlarla ele alınabilir. Tüm bu yöntemlerin seçimi, sistemden beklenen performans, gerçek zamanlı çalışma gereksinimleri ve donanım kısıtları gibi faktörlere bağlı olarak şekillenir.
Günümüz teknolojileri, özellikle otonom sistemler ve yapay zekâ alanında hızla gelişerek tıp, hukuk, askeriye ve daha birçok branşa entegre edilmektedir. Bu sistemler, insan hatasını azaltarak karar alma süreçlerini hızlandırmakta ve verimliliği artırmaktadır. Teknolojinin bu denli hızlı ilerlemesi, mesleklerin dönüşmesine ve yeni çalışma alanlarının ortaya çıkmasına neden olmaktadır. Bu nedenle bireylerin yalnızca bilgi sahibi olması değil, aynı zamanda gelişmeleri yakından takip ederek güncel kalması da büyük önem taşımaktadır. 21. yüzyıl, teknolojik yetkinliğin ve sürekli öğrenmenin başarıyı belirlediği bir çağdır.